Peter Hofbauer’s private Homepage
Selbstbauprojekte
eigene Entwicklungen




Der Schaltplan
Schaltplan Seite 5(8), Regler Modul R
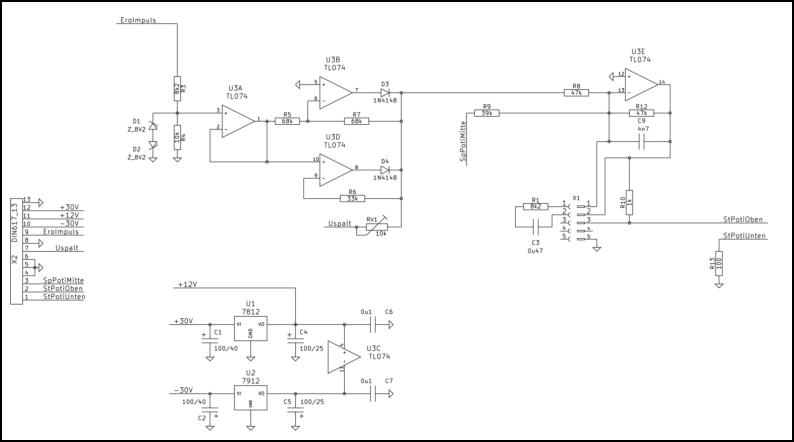
Die Schaltung des Reglers, Modul R:
Diese Schaltung erzeugt aus der Erodierspannung zwischen Werkzeug und Werkstück einen Istwert für die Regelung des Funkenspaltes.
Von der Endstufe kommt über Leitung “Eroimpuls” die Erodierspannung. Die Z-Dioden D1 und D2 kappen die Spitzenwerte weil die nichts
zum gewünschten Effekt beitragen. Mit U3B und U3D wird immer in positiv gewandelt, die Erodierspannung kann ja auch negativ sein.
Der arithmetische Mittelwert der Spannung hinter D3/D4 entspricht etwa der Größe des Funkenspaltes. Über Leitung “Uspalt” gelangt der
Wert zur CPU und wird im LCD oben rechts permanent angezeigt.
Über Leitung “SpPotiMitte” und R9 gelangt ein Sollwert (0...-12V) vom Poti RV3 (”Funkenspalt”) auf der Frontplatte zum U3E. Am Ausgang
von U3E erscheint die Differenz beider Werte und gelangt über Leitung “StPotiOben” zum Poti RV2 (“Stabilität”) auf der Frontplatte. Von
dessen Schleifer gehts dann zum Modul Z. Die Regeleigenschaften werden mit einer kleinen Platine, die auf X1 gesteckt ist, eingestellt. Zur
Zeit sind darauf nur 2 Teile: R1 und C3.
Diese Schaltung bestimmt die Regeleigenschaften des Erodierens. Ich habe dafür ein getrenntes Modul vorgesehen um es später mal gegen
ein anderes Konzept auszutauschen. Es gibt mehrere Konzepte, sobald ich wieder Lust dazu habe, werde ich einige testen.
Schaltplan Seite 6(8), Z-Regler Modul Z
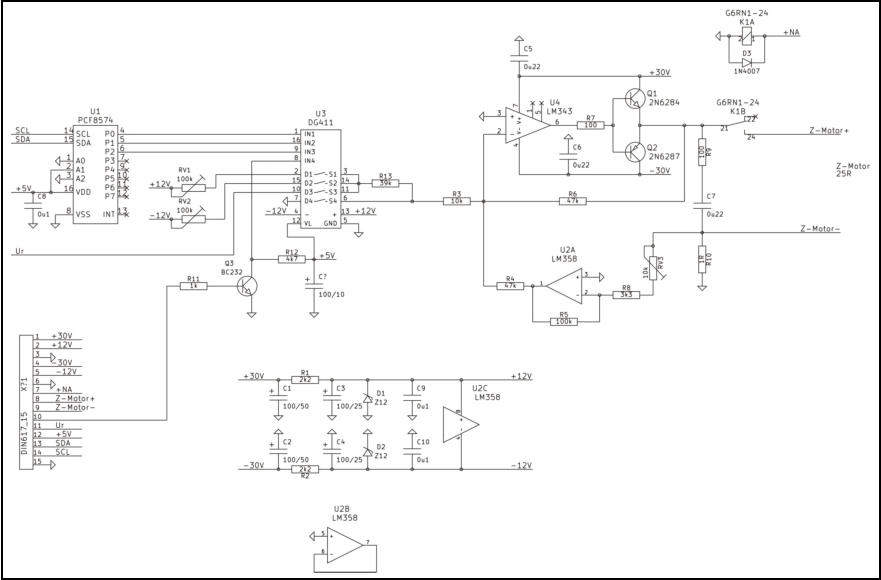
Die Schaltung Z-Regler, Modul Z:
Der Z-Regler steuert den Z-Motor. Der Motor hat keinen Tacho, deshalb habe ich hier eine RxI-Regelung verwendet. Dazu muß die
Spannung an den Motor-Anschlüssen um U = R x I angehoben werden. R ist der ohmsche Widerstand des Motors. Der kann einfach mit ein
DVM gemessen werden. I ist der Motorstrom. Die Spannung an R10 wird mit U2A verstärkt dem virtuellen Nullpunkt des OP U4 zugeführt.
Die Schaltung mit U4 und den beiden Darlingtons Q1 und Q2 bildet einen Leistungs-OP für den DC-Motor in der Z-Einheit. Der
Analogschalter U3 schaltet 3 verschiedene Sollwerte zum Eingang des Leistungs-OP. Über Trimmer RV1 oder RV2 die Auf-Ab-Bewegung mit
der Wippe auf der Frontplatte. Über die Leitung “Ur” kommt die Regelspannung vom Poti “Stabilität” auf der Frontplatte und damit vom Modul
R. Der Transistor Q3 sorgt für einen schnellen Stopp des Z-Motors.
Schaltplan Seite 7(8), Pumpe Modul P
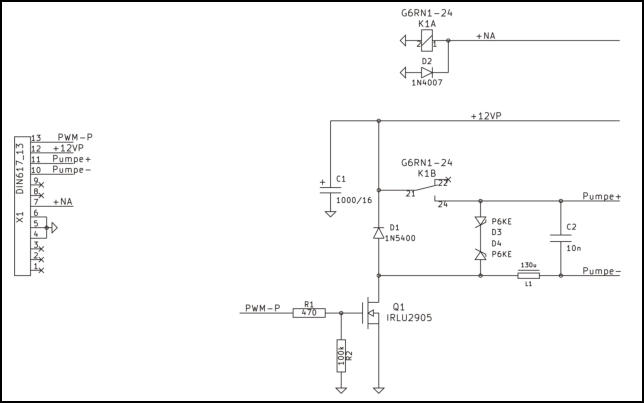
Schaltung Pumpe Modul P
Dies ist der Drehzahlregler für den Pumpenmotor. Geregelt wird mit einer PWM, die mit dem Poti “Pumpe” auf der Frontplatte einzustellen ist.
Mit L1 und C2 werden die Störungen vermindert.
Schaltplan Seite 8(8), CPU-Print Modul C
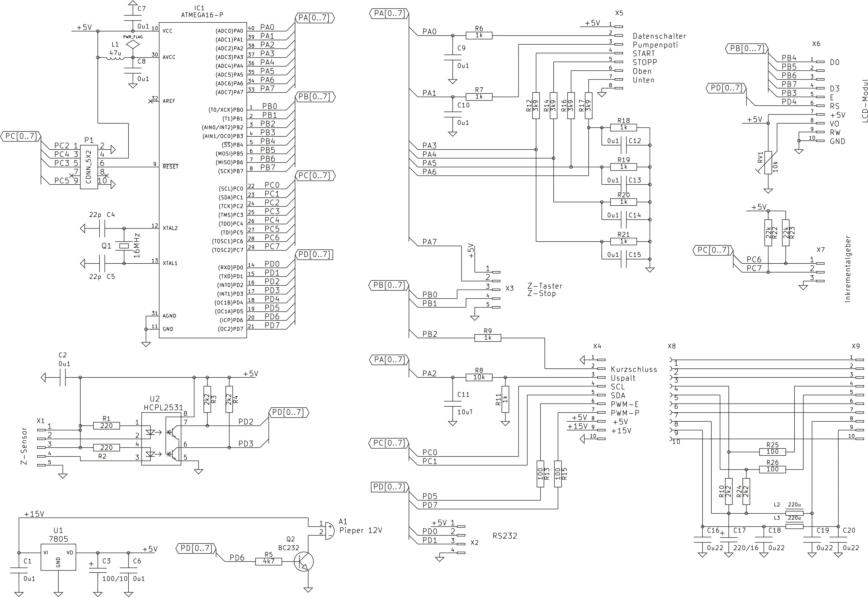
Schaltung CPU-Print SEG96C
Diese Platine enthält den Steuerprozessor ATMEGA16. P1 ist der JTAG-Anschluß.
Über X1 und U2 kommen die Impulse vom Positionssensor der Z-Einheit. Zur Vermeidung von Störungen, die beim Erodieren entstehen, ist ein
Optokoppler dazwischen geschaltet.
Über Q2 wird ein Pieper A1 aktiviert wenn das Erodieren fertig ist.
An X5 sind die Bedienelemente auf der Frontplatte angeschlossen.
Über X4 sind die Module angeschlossen. Die Betriebsspannung kommt auch darüber. Diese Platine war mal für eine andere Anwendung
vorgesehen. Deshalb war eine kleine Zusatzschaltung mit Siebgliedern nötig. X8 geht an X4 und erst X9 geht zu den Modulen. Die Leitungen
des I2C-Bus SLC und SDA habe ich nachträglich abschirmen müssen, weil die I2C-Schaltung im ATMEGA manchmal beim Erodieren abstürzt,
die CPU selber aber normal weiter arbeitet.
X2 ist als Reserve für einen späteren Schnittstellenanschluß zum PC gedacht.
Den ATMEGA habe ich in Assembler programmiert.
SEG96R
SEG96Z
SEG96P
SEG96C